Source Direction
The source direction and polarization section under the “General” tab controls the orientation of the source and determines the propagation and polarization direction of the source. There are two ways to define the direction; the axis definition and the k-vector definition.
Axis definition
If the “axis” option is used for defining the source direction then the propagation direction is defined in the following steps:
Step 1: Injection axis and direction
In DGTD and FEEM, the default propagation direction is along the +z axis and the default electric field polarization direction is along the +x axis. The two inputs “injection axis” [x, y, or z] and “direction” [+ or -] are used to transform the global Cartesian coordinates x, y, z into x’, y’, z’ so that the +z’ axis indicates the propagation direction and the +x’ axis indicates the polarization direction of the electric field.
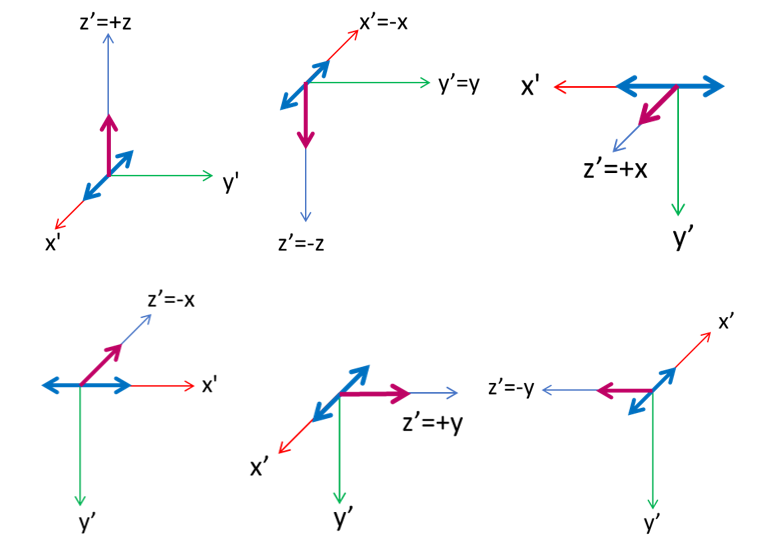
Transformation of cartesian coordinates according to injection axis and direction. The propagation direction is along z’ axis in the transformed coordinate system.
The relationship between propagation axis and polarization axis can be mapped using the table below:
|
Propagation Axis |
Polarization Axis |
|---|---|
|
+z |
+x |
|
-z |
-x |
|
+y |
+x |
|
-y |
-x |
|
+x |
-y |
|
-x |
+y |
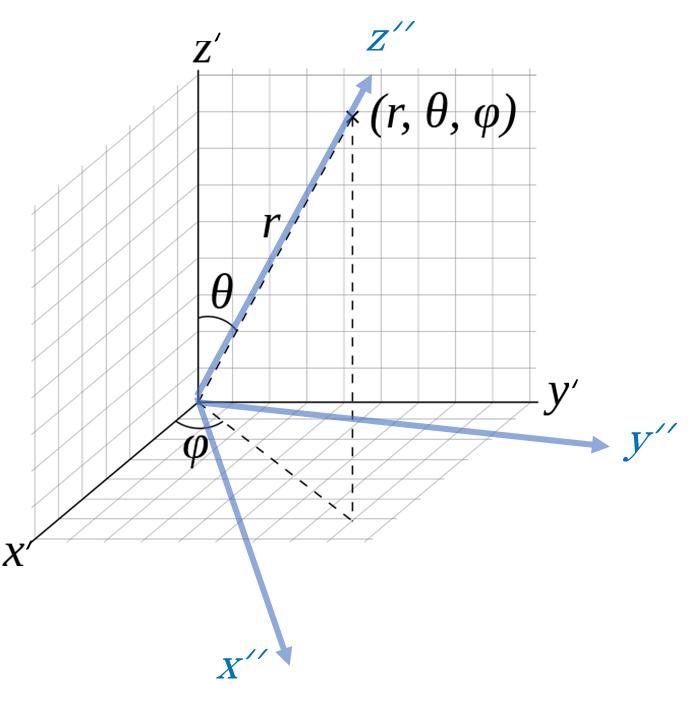
Step 2: Theta and Phi
Once the Cartesian coordinate system is transformed according to injection axis and direction inputs, the next step is to incorporate the two angles theta (angle from normal incidence) and phi (CCW rotation around z’ from x’ = 0). Both these angles can vary from 0 to 360 degrees and define the propagation direction according to the convention shown in Fig. 2. The rotations due to theta and phi results in a new transformed coordinate system x”, y”, z”.
k-vector definition
If the “k-vector” option is used for defining the source direction then the propagation direction is defined by the three inputs kx, ky, and kz. The kx, ky, and kz vector components are used to define the k vector which defines the propagation direction. The default polarization direction (polarization angle = 0 degree) is then defined by the P vector where,
$$\hat{P}=\hat{k}\times\hat{z}$$ if $$\hat{k}\neq\pm\hat{z}$$
$$\hat{P}=-\hat{k}\times\hat{y}$$ otherwise
The global Cartesian coordinate is transformed to a new reference x”, y”, z” where the +z” axis is along the k vector and the +x” axis is along the P vector.
Polarization (angle)
The last step is to include the effect of polarization (CCW rotation around z’’ from x’’ = 0) angle which can vary from 0 to 360 degrees.
|
NOTE: The same convention is used in both 3D and 2D simulations so some 2D simulation planes will have default polarization (0 degree) out-of-plane. |