The Heat Transport (HEAT) solver is a physics-based simulation tool for solid-state devices. The solver can evaluate the heat transport equation independently, or self-consistently solve the coupled system of equations for heat transport and conductive electrical transport to calculate thermal response to Joule heating in an electrically driven system.
Solver physics
The heat transport solver calculates the solution T (the temperature) to the heat transport equation in a solid medium,
$$\rho c_{p} \frac{\partial T}{\partial t}-\nabla \cdot(k \nabla T)=Q$$
where ρ is the mass density (kg/m3), cp is the specific heat (J/kg.K), k is the thermal conductivity (W/m.K), and Q is the applied heat energy transfer rate (W/m3).
The electric current equation (Ohm’s law)
$$\mathbf{J}=\sigma \mathbf{E}=-\sigma \nabla V $$
with electrical conductivity σ (1/Ohm.m) can also be solved self-consistently with the heat transport equation. Combined with the auxiliary continuity equation,
$$\frac{\partial \rho}{\partial t}=-\nabla \cdot \mathbf{J}$$
with charge density ρ (1/m3) and Gauss’s law (for DC permittivity ε),
$$-\nabla \cdot(\varepsilon \nabla V)=\rho$$
one obtains the following differential equation for a homogenous material system:
$$\frac{\partial \rho}{\partial t}+\frac{\sigma}{\varepsilon} \rho=0$$
The solution to this equation is an exponential decay with a relaxation time τ=ε/σ. When changes to the system are observed on time scales where t>>τ, the quasi-static approximation can be applied, and ∂ρ/∂t~0. Note that in steady-state, ∂ρ/∂t=0 by construction. Under the quasi-static approximation, the electric current equation combined with the continuity equation reduces to
$$\nabla \cdot(\sigma \mathbf{E})=0$$
The power dissipated due to Ohmic loss is equivalent to
$$P=\mathbf{J} \cdot \mathbf{E}=\sigma E^{2}$$
which is then applied to the heat transport equations as a heat energy transfer rate Q=P (Joule heating).
The heat transport solver discretizes and solves the heat transport equation or the coupled heat transport and electric current equations on a finite-element mesh in two or three dimensions. The simulation region is partitioned into multiple domains along boundaries between materials with unique physical descriptions. The materials used in the simulation may be categorized as insulators, semiconductors, alloys of semiconductors, conductors, or fluids; each type of material has an associated user-specified model or collection of models that describe its behavior. Domains of fluid materials are not directly simulated: fluids can specify boundary conditions to the simulation that depend on their physical properties.
The system of equations solved for a heat transport simulation admit both a steady-state and time-varying result. In steady-state,
$$\frac{\partial T}{\partial t}=0$$
and the heat transport equation reduces to
$$-\nabla \cdot(k \nabla T)=Q$$
while the electric current equations remain as
$$\nabla \cdot(\sigma \mathbf{E})=0$$
Steady-state simulations can be used to examine the system’s behavior at a fixed operating point. Alternately, by specifying an initial condition for the temperature (and electric field, if required), the equations can be solved in a sequence of discrete times. The time-dependent behavior of the component can then be used to directly evaluate its large-signal time-domain response.
Boundary conditions are very important in an accurate simulation of a solid-state device. The heat transport solver supports a variety of boundary conditions that can be applied at the interface between two materials, at the surface of a geometric solid, at a simulation boundary, or at the intersection of a solid and the simulation boundary. The boundary conditions for heat transport and their applicability are enumerated in the table that follows. For simulations that couple the electric current equations, uniform electrostatic boundary conditions are supported (both steady-state and time-varying). For internal boundaries between material domains, continuity of variables is enforced. Where a boundary condition is not defined, the boundary is assumed to be insulating.
| Condition | Material/ Material | Solid Boundary | Simulation Boundary | Simulation /Solid boundary intersection |
|---|---|---|---|---|
|
Fixed temperature |
|
Y |
Y |
Y |
|
Fixed temperature |
|
X |
X |
X |
|
Power |
|
Y |
Y |
Y |
|
Heat flux |
X |
X |
X |
X |
|
Convection |
|
|
|
|
|
Constant |
X |
X |
X |
X |
|
Forced flow |
X |
|
|
|
|
Natural flow, top surface |
X |
|
|
|
|
Natural flow, bottom surface |
X |
|
|
|
|
Natural flow, vertical surface |
X |
|
|
|
|
Radiation |
X |
X |
X |
X |
Supported boundary conditions and interface types for heat transport. X indicates steady-state only, Y indicates steady-state and time-varying. Radiative boundary conditions can be combined with convection.
Meshing
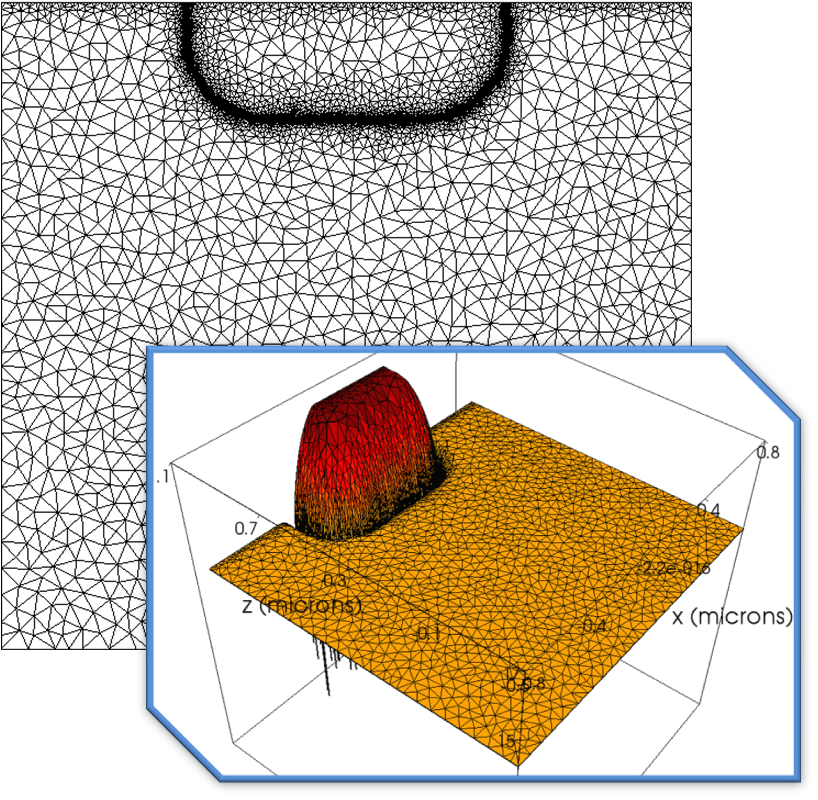
HEAT transport solver uses a finite-element mesh, like the one shown in the following screenshot. The solution to the system of equations used to determine the physical quantities of interest is estimated from the discrete formulation of those equations. Consequently, it's important to understand that the fundamental simulation quantities (material properties, geometry information, temperature, and electrostatic potential) are calculated at each mesh vertex.
A finer mesh (with shorter edge lengths and smaller elements) will better approximate the exact solution to the system of equations, but at a substantial cost in simulation performance. As the mesh features become smaller, the simulation time and memory requirements will increase. HEAT provides a number of tools, including the automatic and guided mesh refinement, that allow you to obtain accurate results, while minimizing computational effort.
Units and normalization
| Quantity | Description | Units | Unit description |
|---|---|---|---|
|
Length |
Length units in heat transport simulations |
M |
Meter (SI) |
|
Temperature |
Average thermal energy |
K |
Kelvin (SI) |
|
Electrostatic potential |
Electrostatic potential energy relative to a reference |
V |
Voltage |